


















Obiettivo di progettazione del circuito di azionamento del motore CC
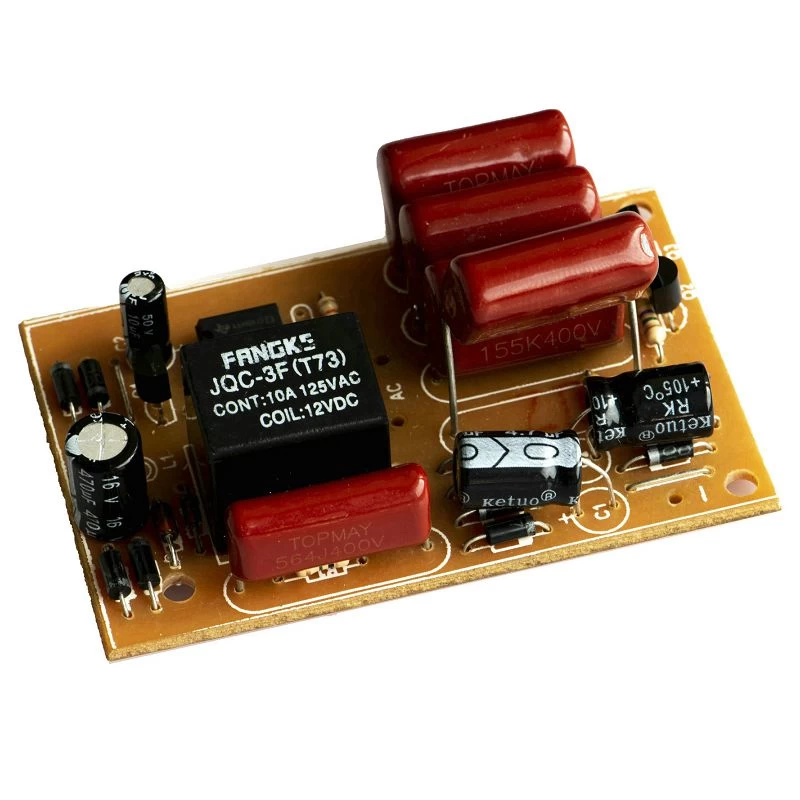
1. Funzione: il motore è unidirezionale o bidirezionale? Ha bisogno di una regolazione della velocità? Per l'azionamento a motore unidirezionale, utilizzare solo un triodo ad alta potenza o FET o relè per azionare direttamente il motore. Quando è necessario ruotare il motore in entrambe le direzioni, è possibile utilizzare un circuito a ponte H composto da 4 componenti di potenza o utilizzare un relè a doppio raggio a doppio polo. Se la regolazione della velocità non è richiesta, basta usare il relè; ma se è necessaria la regolazione della velocità, la regolazione della velocità PWM (modulazione dell'ampiezza dell'impulso) può essere realizzata utilizzando elementi di commutazione come triodo e FET. Produttore di PCB multistrato in Cina.

2. Prestazioni: per il circuito di azionamento del motore di azionamento PWM, gli indicatori di prestazione principali sono i seguenti.
1) Intervallo di corrente e tensione di uscita, che determina la quantità di energia che il circuito può guidare.
2) Efficienza, alta efficienza non significa solo risparmiare energia, ma anche ridurre il riscaldamento del circuito di pilotaggio. Per migliorare l'efficienza del circuito, è possibile garantire lo stato di commutazione del dispositivo di potenza e prevenire la conduzione dello stato comune (un problema che può verificarsi nel ponte H o nel circuito push-pull, ovvero, entrambi i dispositivi di potenza sono contemporaneamente attivato per cortocircuitare l'alimentazione).
3) L'effetto sull'ingresso di controllo. Il circuito di alimentazione dovrebbe avere un buon isolamento del segnale all'ingresso per evitare che tensioni elevate e correnti elevate entrino nel circuito di controllo principale, che può essere isolato con un'impedenza o un accoppiatore ottico elevati.
PCB rigido-flessibile con ENIG.
4) L'impatto sull'alimentazione. La conduzione a stato comune può causare una caduta transitoria della tensione di alimentazione per causare la contaminazione dell'alimentazione ad alta frequenza; grandi correnti possono far fluttuare il potenziale di terra.
5) Affidabilità. Il circuito di guida del motore dovrebbe essere il più vicino possibile, indipendentemente dal tipo di segnale di controllo, dal tipo di carico passivo, dal circuito sicuro.
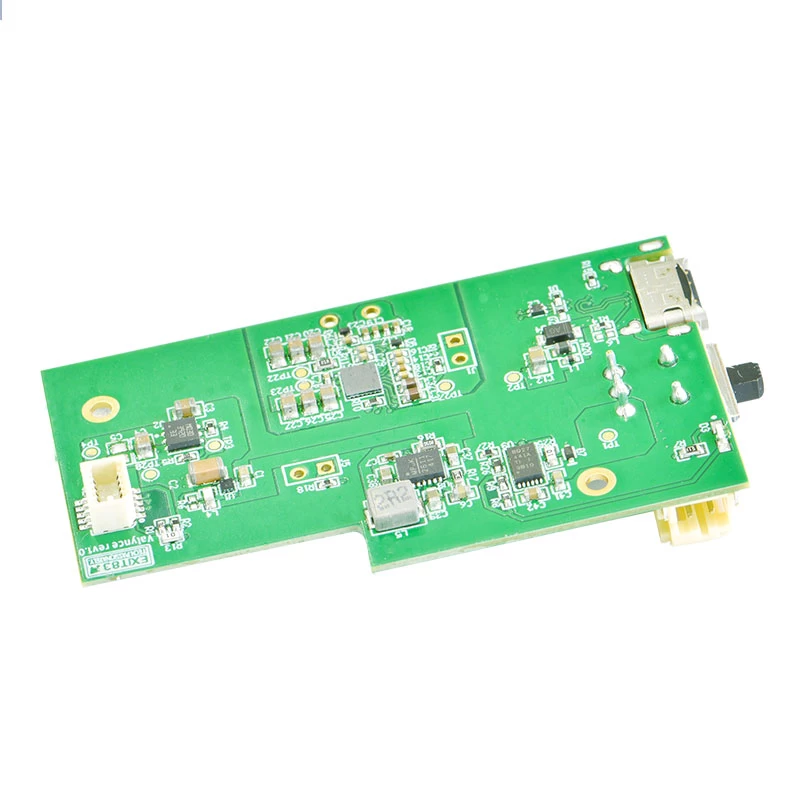
1. Sezioni di input e level shifting:
La linea del segnale di ingresso è introdotta da DATA, 1 pin è la linea di terra e il resto è la linea del segnale. Notare che 1 piede a terra è collegato a un resistore da 2K ohm. Quando la scheda driver e il microcontrollore sono alimentati separatamente, questo resistore può fornire un percorso per il reflow della corrente del segnale. Quando la scheda driver e il microcontroller condividono un gruppo di alimentatori, questo resistore può impedire che correnti di grandi dimensioni scorrano lungo i fili che confluiscono nel terreno della scheda del microcontrollore. In altre parole, equivale a separare la linea di terra della scheda driver dalla linea di terra del microcontrollore per ottenere una "messa a terra a un punto".
Produttore compatibile con RoHs Cina.

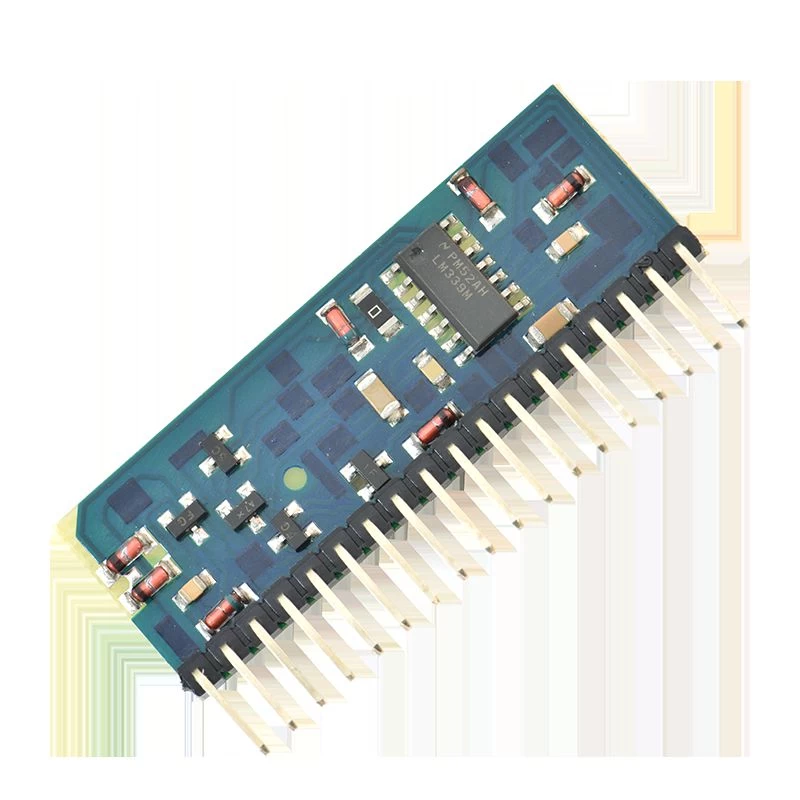
L'amplificatore operazionale ad alta velocità KF347 (disponibile anche come TL084) funge da comparatore che confronta il segnale logico di ingresso con una tensione di riferimento di 2,7 V dall'indicatore e un diodo e lo converte in un segnale a onda quadra vicino all'alimentatore ampiezza di tensione. Il campo della tensione di ingresso del KF347 non può essere vicino alla tensione di alimentazione negativa, altrimenti si verificherà un errore. Pertanto, un ingresso diodo che impedisce che l'intervallo di tensione trabocchi sia aggiunto all'ingresso dell'amplificatore operazionale. Uno dei due resistori all'ingresso viene utilizzato per limitare la corrente e uno viene utilizzato per ridurre l'ingresso quando l'ingresso viene lasciato flottante.
L'LM339 o qualsiasi altro comparatore a circuito aperto non può essere utilizzato al posto dell'amplificatore operazionale, poiché l'impedenza di uscita di alto livello dell'uscita a circuito aperto è superiore a 1 kΩ e la caduta di tensione è elevata. Il transistor di quest'ultimo stadio non può essere disattivato.
2. Parte di azionamento del cancello:
Il circuito composto dal triodo posteriore e dal resistore e dal tubo Zener amplifica ulteriormente il segnale, guida il gate del FET e utilizza la capacità di gate del FET stesso (circa 1000pF) per ritardare il FET dei bracci superiore e inferiore del H-bridge. La conduzione simultanea ("common state conduction") provoca un cortocircuito nell'alimentatore.
Quando l'uscita dell'amplificatore operazionale è bassa (circa da 1 V a 2 V, che non può raggiungere completamente lo zero), il transistor inferiore viene disattivato e il FET viene attivato. Il transistor superiore è acceso, il FET è spento e l'uscita è alta. Quando l'uscita dell'amplificatore operazionale è elevata (circa VCC- (da 1 V a 2 V) e non può raggiungere completamente VCC), il transistor inferiore viene acceso e il FET viene disattivato. Il transistor superiore è spento, il FET è acceso e l'uscita è bassa.