
















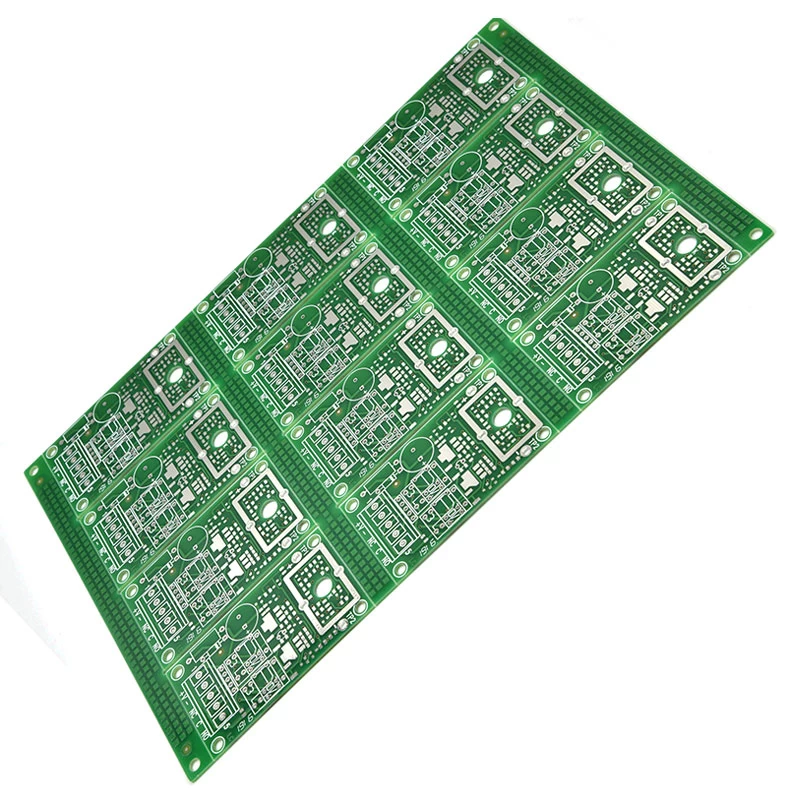


Objectif de conception du circuit d'entraînement du moteur à courant continu
1. Fonction: Le moteur est-il unidirectionnel ou bidirectionnel? A-t-il besoin d'une régulation de la vitesse? Pour un entraînement par moteur à sens unique, utilisez simplement une triode, un FET ou un relais de forte puissance pour entraîner directement le moteur. Lorsque le moteur doit tourner dans les deux sens, vous pouvez utiliser un circuit en pont en H comprenant 4 composants de puissance ou un relais bipolaire à deux positions. Si la régulation de la vitesse n'est pas nécessaire, utilisez simplement le relais; mais si une régulation de vitesse est requise, la régulation de vitesse PWM (modulation de largeur d'impulsion) peut être réalisée en utilisant des éléments de commutation tels que triode et FET. Fabricant multicouche de PCB en Chine.

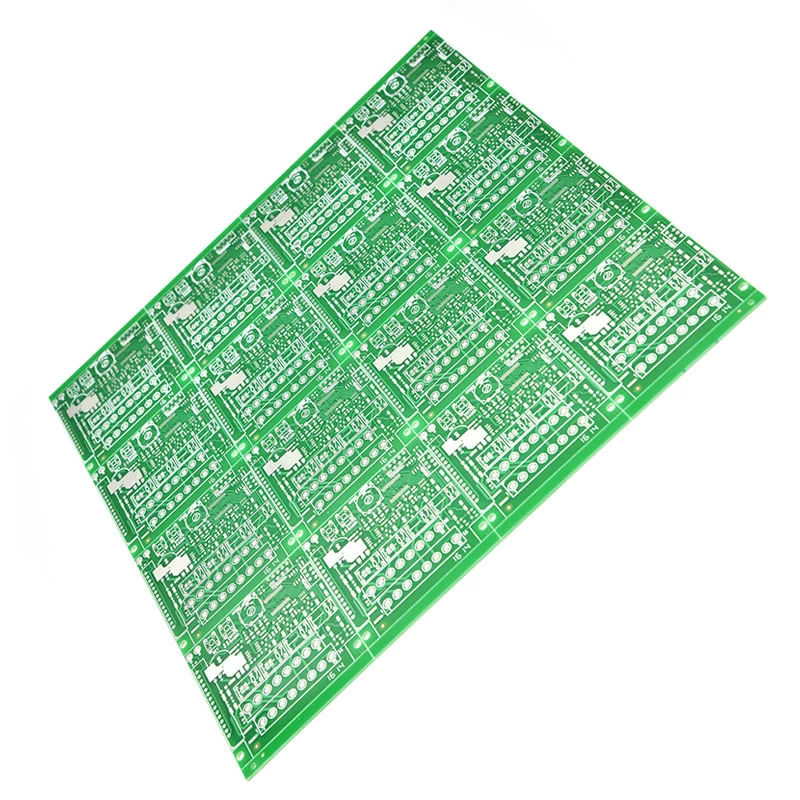
2. Performances: Pour le circuit de commande du moteur d’entraînement PWM, les principaux indicateurs de performance sont les suivants.
1) La plage de courant et de tension de sortie, qui détermine la puissance que le circuit peut piloter.
2) L’efficacité, le rendement élevé ne signifient pas seulement une économie de puissance, mais également une réduction du chauffage du circuit de commande. Pour améliorer l'efficacité du circuit, il est possible de garantir l'état de commutation du dispositif d'alimentation et d'empêcher la conduction à l'état commun (un problème pouvant survenir dans le circuit en pont en H ou dans le circuit push-pull, c'est-à-dire allumé simultanément pour court-circuiter l’alimentation).
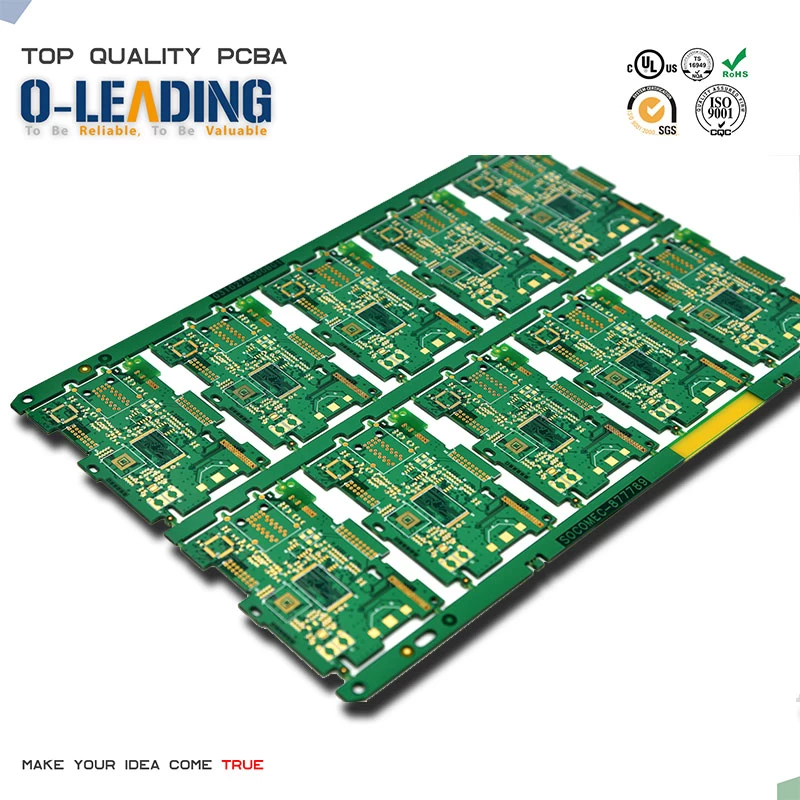
3) L'effet sur l'entrée de contrôle. Le circuit d'alimentation doit avoir un bon isolement du signal à son entrée pour empêcher une haute tension et un courant élevé d'entrer dans le circuit de contrôle principal, qui peut être isolé avec une impédance d'entrée élevée ou un optocoupleur.
PCB rigide-flexible avec ENIG.
4) L'impact sur l'alimentation. La conduction à l'état commun peut provoquer une chute transitoire de la tension d'alimentation, entraînant une contamination de l'alimentation haute fréquence; des courants importants peuvent faire flotter le potentiel de la terre.
5) fiabilité. Le circuit de commande du moteur doit être aussi proche que possible, quel que soit le type de signal de commande, le type de charge passive, le circuit est sûr.
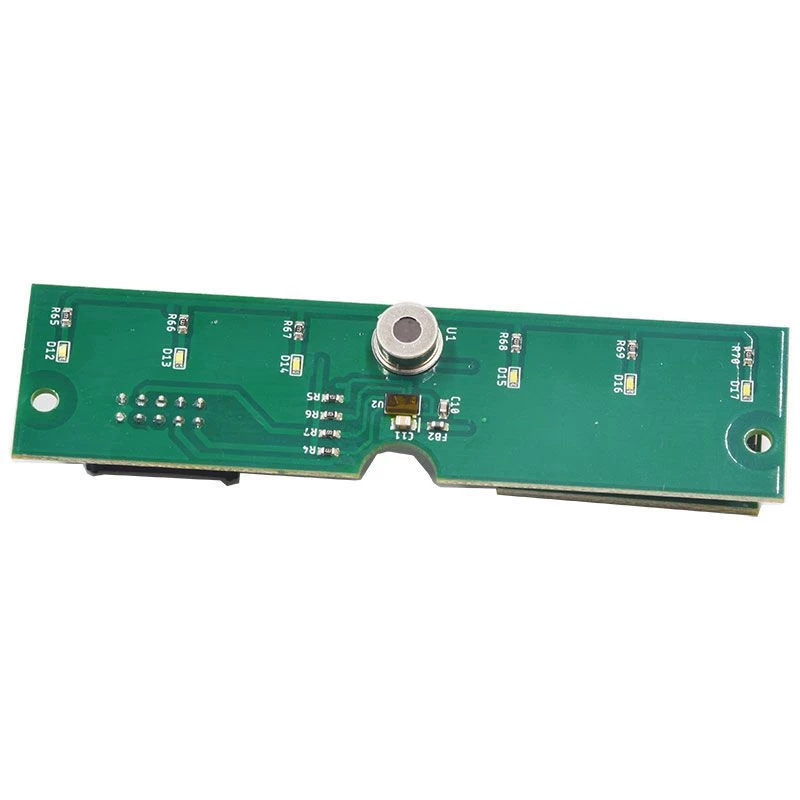
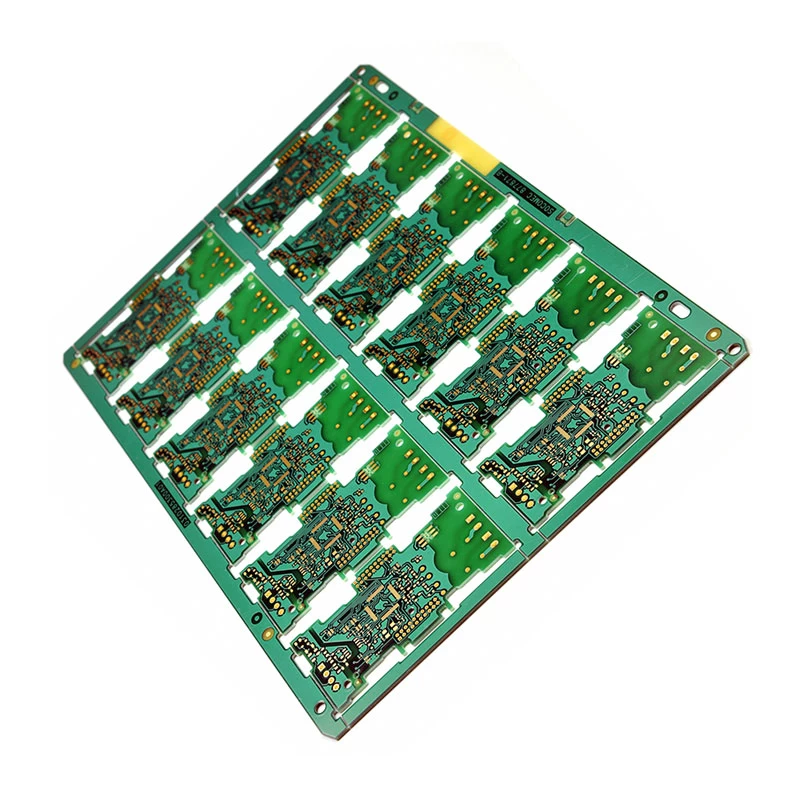
1. Sections d'entrée et de décalage de niveau:
La ligne de signal d'entrée est introduite par DATA, 1 broche est la ligne de masse et le reste est la ligne de signal. Notez que 1 pied à la terre est connecté à une résistance de 2K ohms. Lorsque la carte de pilotage et le microcontrôleur sont alimentés séparément, cette résistance peut fournir un chemin pour la refusion du courant du signal. Lorsque la carte de pilotage et le microcontrôleur partagent un ensemble de sources d'alimentation, cette résistance peut empêcher les courants importants de circuler le long des fils qui passent dans la terre de la carte de microcontrôleur. En d'autres termes, cela revient à séparer la ligne de masse de la carte de contrôle de la ligne de masse du microcontrôleur pour obtenir une "mise à la terre en un point".
RoHs conforme fabricant Chine.

L'amplificateur opérationnel haute vitesse KF347 (également disponible sous la référence TL084) sert de comparateur qui compare le signal logique d'entrée à une tension de référence de 2,7 V provenant de l'indicateur et d'une diode et le convertit en un signal à onde carrée proche de l'alimentation amplitude de tension. La plage de tension d'entrée du KF347 ne peut pas être proche de la tension d'alimentation négative, sinon une erreur se produirait. Par conséquent, une diode qui empêche la plage de tension de déborder est ajoutée à l'entrée de l'ampli op. Une des deux résistances à l’entrée sert à limiter le courant et l’autre à abaisser l’entrée lorsque celle-ci est laissée flottante.
Le LM339 ou tout autre comparateur à circuit ouvert ne peut pas être utilisé à la place de l'amplificateur opérationnel, car l'impédance de sortie haut niveau de la sortie à circuit ouvert est supérieure à 1 kΩ et la chute de tension est importante. Le transistor de ce dernier étage ne peut pas être désactivé.
2. Partie moteur de la porte:
Le circuit composé de la triode arrière et de la résistance et du tube de Zener amplifie davantage le signal, commande la grille du FET et utilise la capacité de grille du FET lui-même (environ 1000 pF) pour retarder le FET des bras supérieur et inférieur du Pont en H La conduction simultanée ("conduction d'état commun") provoque un court-circuit dans l'alimentation.
Lorsque la sortie de l'amplificateur opérationnel est basse (environ 1V à 2V, ce qui ne peut pas atteindre complètement zéro), le transistor inférieur est désactivé et le FET est activé. Le transistor supérieur est activé, le FET est désactivé et la sortie est haute. Lorsque la sortie de l'amplificateur opérationnel est haute (environ VCC- (1V à 2V) et ne peut pas atteindre complètement VCC), le transistor inférieur est activé et le FET est désactivé. Le transistor supérieur est désactivé, le FET est activé et la sortie est faible.